Virtual Simulation
Simulate operations before execution
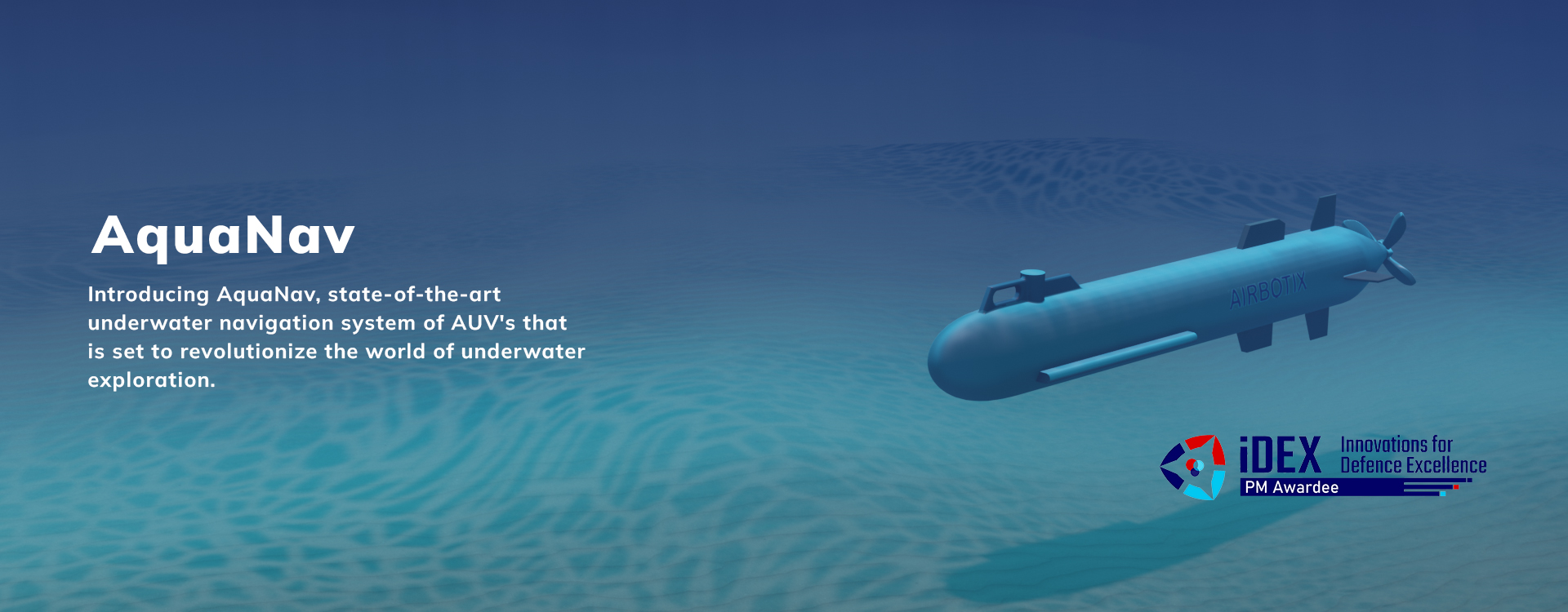
Autonomous Navigation
Zero human intervention required

Sensor Fusion
State-of-the-art algorithms for localization
Cross platform compatibility
Can be configured for any unmanned underwater vehicle

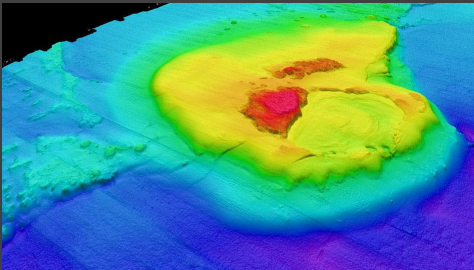
Terrain Aided Localization
Minimize drift in position estimates

Interactive Mission Planner
User-friendly mission planning graphical user interface